
Motoren und Technik8 min Lesezeit
Autopilot für foilende Imocas
Wie das wichtigste Einhandsegler-Zubehör funktioniert und was es alles kann.

Einblicke in die abgefahrene Welt aktueller Autopilot-Technologie. Wie sie funktioniert. Warum Sensoren vom Auto oder Handy nicht langen. Wie die Daten für extreme Bedingungen oder für Höchstgeschwindigkeit aufbereitet werden. Verschiedene Steuer-Betriebsarten.
Von Erdmann Braschos
Das erwartet Sie in diesem Artikel
- Wie ein Autopilot aufgebaut ist
- Welche Daten er von welchen Sensoren kriegt
- Faserkreisel statt Fluxgate Magnetometer
- Das elektronische Stabilitätsprogramm (ESP) vom Auto
- Bildstabilisierung aus dem Handy
- Korrektur der Daten aus der Windmessanlage im Masttop
- Prozessorgeschwindigkeiten von 100 Hertz
- wie Lastgeber Boot und Foils schonen
- Faser-Bragg-Gitter zur Belastungsmessung
- Spezialisten aus der Bretagne
- GPS mit fünffacher Datenrate
- wo beim IMOCA der Loggengeber sitzt
- Faseroptische Belastungsmessungen
- Erinnerung an den Pionier Brookes & Gatehouse
Hochseeregatten wie die Vendée Globe finden bekanntlich an der frischen Luft statt. Das ist bei der 44.000 Kilometer Regatta um die Welt nicht anders zu erwarten. Tatsächlich absolvieren die Segler sie jedoch fast ausschliesslich in einem kleinen Kabuff unter Deck. Es hat eine Pritsche zum Schlafen, eine Sitz- und Kochgelegenheit, Instrumente, Rechner und Bildschirme. Während ältere IMOCA hinter dem Unterschlupf noch ein spritzwassergeschütztes Cockpit hatten, sind die aktuellen Boote weitgehend überdacht.

Der deutsche Teilnehmer Boris Hermann segelt seinen ersten IMOCA im Schutz eines hinten offenen Unterstands. Nur bei leichtem Wind und wenig Fahrt kann er sich halbwegs sicher und trocken an Deck aufhalten. Bei mehr wird es nass. Bei voller Fahrt wäscht das Meer regelmässig mit einem Schwall Wasser über das Boot. Das aktuelle Boot ist komplett bis achtern geschlossen.
Den Steuerjob übernimmt ein Autopilot – und zwar praktisch die gesamte Strecke von Les Sables-d’ Olonne bis Les Sables-d’Olonne. Von diesem Hochleistungs-Automaten wird der Segler um die Welt gesegelt. Er macht das besser, als es der Segler selbst könnte. Denn der Autopilot ist nicht nur Tag und Nacht im Einsatz. Er ist bestens vernetzt und wird nie müde, solange er Strom bekommt und nicht durch Verschleiss den Geist aufgibt.

Ein Autopilot ist einfach aufgebaut. Ein seitlich an der Ruderwelle angebrachter Hebel wird von einem Schubgestänge bewegt. Boris Hermanns „Seaexplorer“ ist mit einem elektrischen Autopiloten unterwegs, wobei ein Zweiter als Backup zum Umschalten bei einer Störung bereits fertig installiert ist und sofort aktiviert werden kann.

Etwas komplizierter ist es, wie die Kurskorrekturen zustande kommen. Der Rechner des Autopiloten wird mit Daten aus vielen Bereichen des Bootes gefüttert, unter anderem dem eingestellten Kurs. Früher wurde dieser mit einem sogenannten Fluxgate-Magnetometer bestimmt, der für heutige Anwendungen der rasanten Imocas jedoch zu ungenau ist.
Quadrans-Zauberbox als Highspeed-Kompass
Heute übernimmt das die sogenannte Interferometrische Glasfaser-Gyro-Technologie (IFOG), kurz Faserkreisel genannt. Er enthält keine beweglichen, verschleiss trächtigen Teile und misst Bewegungen und Richtungsänderungen mit enormer Geschwindigkeit und Präzision: bei Grand Prix Regattabooten, der Marine, der kommerziellen Schifffahrt oder selbst lenkenden Waffen. Die kleine „Quadrans“ genannte Box ist wartungsfrei, nach IP 66 spritzwassergeschützt und wiegt keine 3 Kilogramm.

Autos werden von Fahrstabilitäts-Systemen wie ESP mit dem Vergleich der sogenannten Gierrate, gemeint ist die abrupte Abweichung zur bisherigen Fahrtrichtung, auf den Rädern gehalten. Beschleunigungs- und Drehratensensoren sind zur Bildstabilisierung in Digitalkameras, Handys, Drohnen und zunehmend in Internet of Things-Anwendungen üblich. Leider sind solche Beschleunigungsmesser und Gyroskope fehleranfällig gegenüber dem sogenannten Rauschen und auf Dauer für Hochgeschwindigkeitssegeln auch zu ungenau. An Bord der Vendée Globe Boote liefert daher der erwähnte Faserkreisel-Kompass die benötigten Daten.
Der nächste entscheidende Sensor ist die Windmessanlage. Sie informiert über die Windrichtung und -stärke. Der Wind wird zugunsten guter Messwerte am Ende einer deutlich über das Top ragenden Stange gemessen, wo es weniger Wirbel gibt. Der lange Hebelarm, Vibrationen und bis ins Top gelangende Schläge der hart gesegelten Boote macht den Gebern zu schaffen. Da sich der Einhand-Segelmarathon um die Welt ohne Windmessanlage nicht erfolgreich absolvieren lässt, ist es üblich, dass die Seglerinnen und Segler die Sensoren 30 m über dem Meer ersetzen.
Wie Schiffsbewegungen herausgefiltert werden
Denn die maximale Geschwindigkeit wird anhand des genau passend zur Windrichtung passenden Kurses erreicht, für den die Segel getrimmt sind. Der Autopilot steuert anhand eines vorab eingestellten Windwinkels. Da das Präzisionsinstrument infolge der rasanten Bewegungen des Bootes im Seegang, aber auch permanente Windrichtungsänderungen an der Mastspitze misst, werden diese Schiffsbewegungen gezielt herausgefiltert. Fährt das Boot etwa einen Wellenberg hinab, schwingt die Mastspitze nach vorn und der Windeinfallswinkel wird spitzer, als er ohne die Talfahrt wäre.
Übernähme der Autopilot nun diese Daten ungefiltert, würde der Kurs unnötig geändert. Das Boot würde von den Foils abstürzen. Der zentrale Bordrechner des französischen Spezialisten Madintec beispielsweise gleicht die Winddaten mit den Bewegungen des Bootes per Beschleunigungs-, Dreh- und Gierraten-Sensorik in einem zentralen Rechner ab und wandelt die Datenflut von 100 Hertz (sprich 100 x pro Sekunde) in 50 Herz-Steuerbefehle für den Autopiloten.
Drittens füttern Last-Geber den Bordrechner des Bootes permanent mit Daten aus den Segeln, Takelage, dem Rumpf und Foils. Denn die grösste Herausforderung der Vendée Globe ist es, überhaupt anzukommen. Während früher überwiegend Gefühl, Tagesform, Müdigkeit und Stimmungen des Seglers entschieden, was dem Boot und der Takelage an Krängung, Geschwindigkeit und Schlägen infolge des Seegangs zumutbar ist, treffen bei modernen Vendée Globe Booten Beschleunigungs- und Belastungsmesser diese Entscheidung.
Boris Hermann berichtet von jeweils 15 Messpunkten in den seitlichen Tragflächen seiner „Seaexplorer“. Auch diese Werte gehen in die Kurswahl ein und veranlassen den Autopiloten zur materialschonenden Kursänderung. Lästige Piepstöne, wie man sie aus dem Krankenhaus kennt, warnen und wecken den Segler – sei es, um die Segelfläche anzupassen, oder um mit leicht eingezogener Tragfläche Druck aus dem Boot zu nehmen. Boris Hermann wurde schon bei einem plötzlichen 38-Knoten-Sprint gewarnt.
Der „Beast Mode“
Der sogenannte „Beast Mode“ des Autopiloten hält das Boot mit flinken Kurskorrekturen bei geringstmöglich bremsendem Wasserkontakt auf der Tragfläche und damit auf Spitzengeschwindigkeit. Bei hohen, für normale Freizeitsegler unerreichbaren Geschwindigkeiten von teilweise 30 Knoten und mehr profitieren Boot und Autopilot vom erwähnten Datendurchsatz. Der schnellstmögliche Kurs wird anhand des Krängungswinkels des Bootes eingestellt. So wird ein moderner Imoca 60 idealerweise mit maximal aufrichtendem Moment in einem möglichst konstant gehaltenen Winkel auf dem leeseitigen Foil gesegelt.

Dafür gibt es einen speziellen Algorithmus. Den haben Spezialisten für die Vendée Globe Teams selbst geschrieben – und zwar massgeschneidert auf die absehbaren Wind- und Seegangbedingungen, passend zum Boot und Segler. Spezialist Madintec aus La Rochelle ist als Entwickler für die französisch dominierte Szene des Hochsee Regattasegelns und regelmässig unterbotener Rekorde mit riesigen, neuerdings komplett fliegenden Dreirümpfern da schon seit einer Weile im Thema. Die Steuerung des Autopiloten im Hochsee-Tiefflug mit den derzeit bei den Imoca 60 Booten bisher nicht zugelassenen Tragflächen auch am Ruder ist bereits fertig entwickelt. Noch ziehen die Boote die Heckpartie ihrer Rümpfe im Verdränger- oder Gleitmodus durch das Meer.
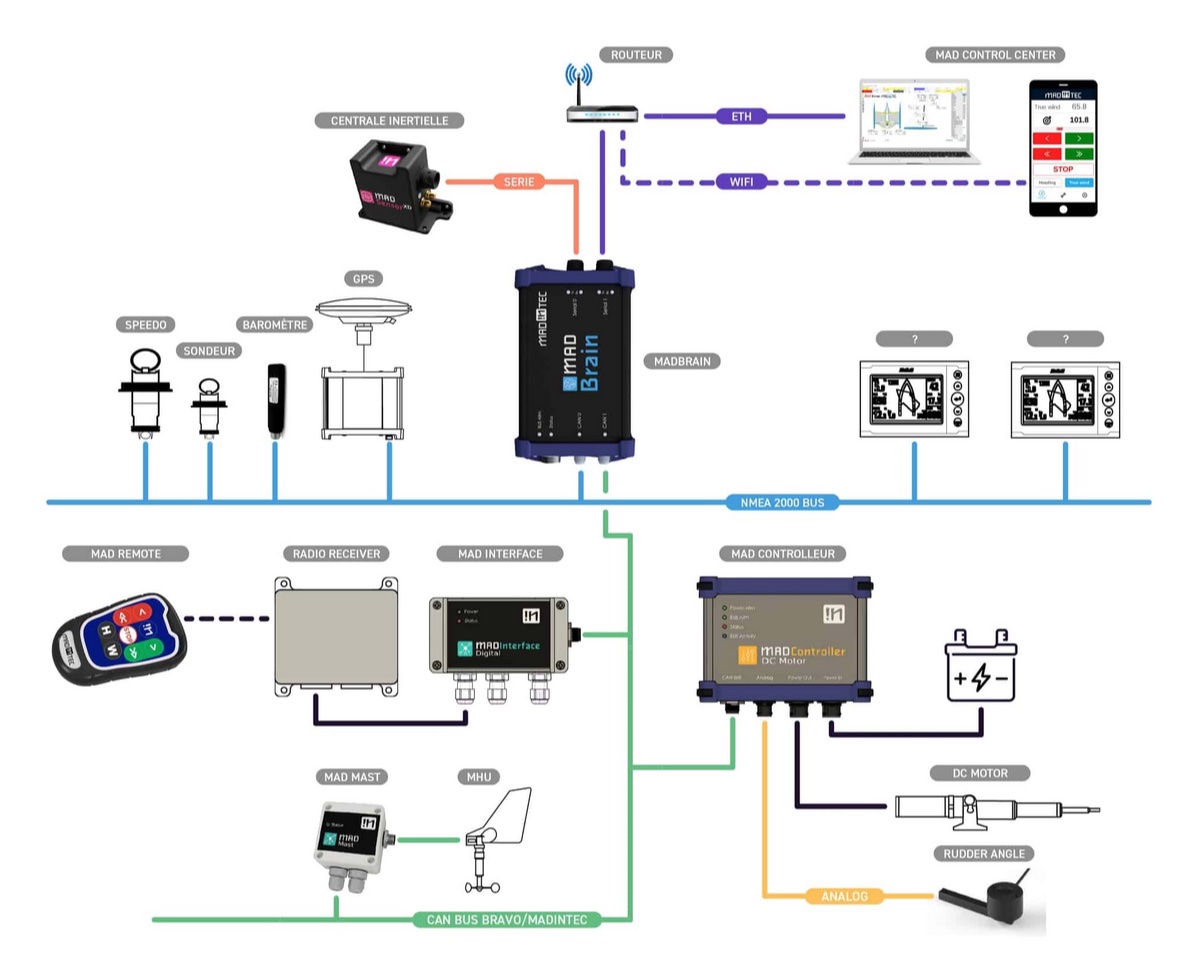
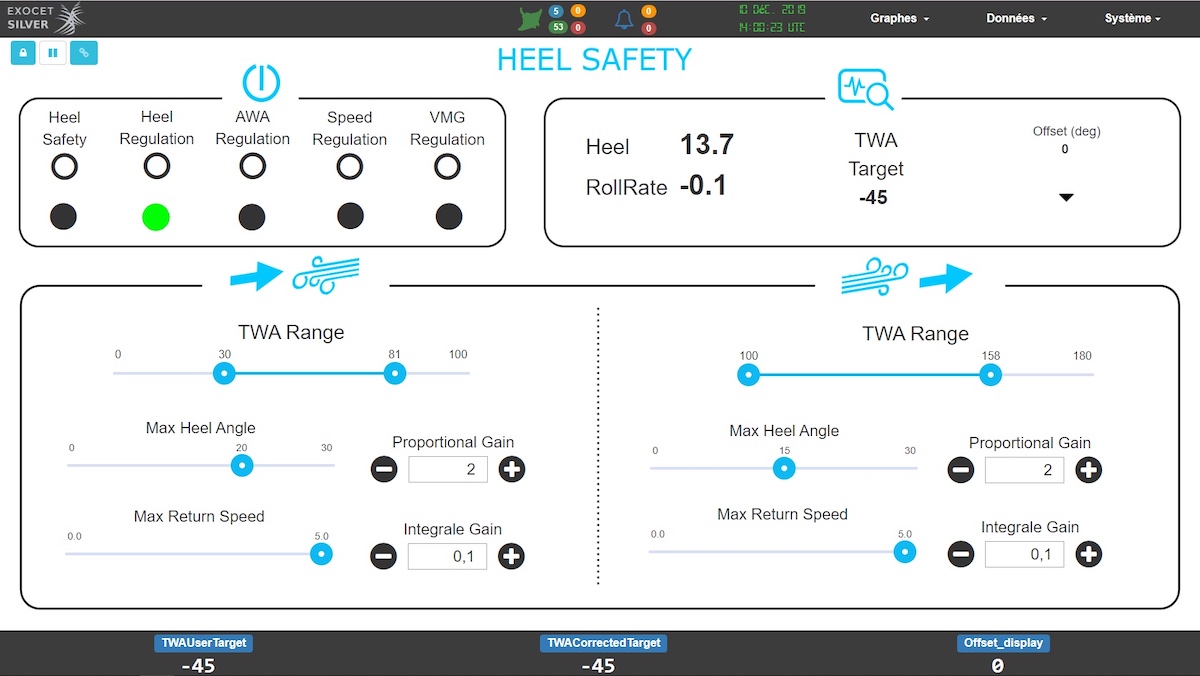
Der aktuelle „Super-Pilot“ mit dem Programm „MadBrain“ von Madintec bietet drei verschiedene Betriebsarten:
1. Krängungsabhängiges Steuern mit einer vorab eingestellten Unter- und Obergrenze bei böigen Verhältnissen.
2. Am scheinbaren Wind orientiertes Steuern zugunsten einer konstanten Geschwindigkeit. Ideal für Leichtwind-Verhältnisse und viel Seegang.
3. Der Geschwindigkeitsmodus mit vorab eingestellter Mindest- und Höchstgeschwindigkeit.
Ergänzend zu einem besonders schnellen GPS mit zehn- statt zweifacher Datenrate pro Sekunde wird die Geschwindigkeit durchs Wasser mit einem herkömmlichen kleinen Impeller gemessen, wie es heute jedes Freizeitboot als Impeller im Rumpf montiert hat. Da die modernen Vendée Globe Boote mittschiffs über Wasser segeln, steckt der Impeller des Loggengebers im 4,50 m tiefen Kiel.
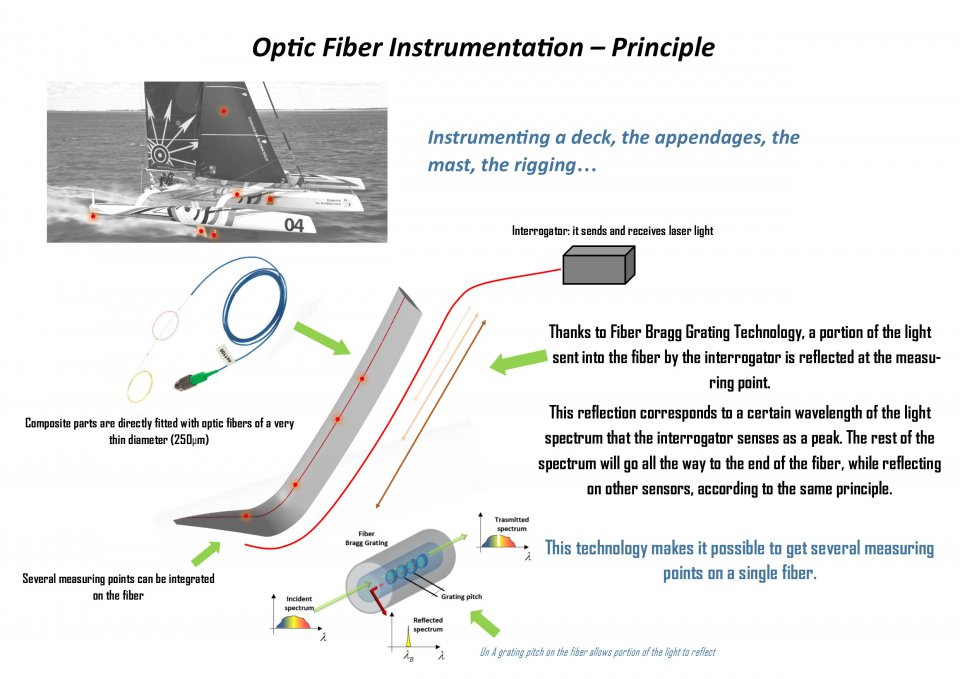
Faseroptische Belastungsmessungen in Bauteilen aus Verbundwerkstoffen sind in den Flügeln von Windenergieanlagen, bei Renn- oder Megayachten seit einer Weile üblich. Dort, wo grosse dynamische Lasten zustande kommen und die Beanspruchung sicherheitshalber zu drosseln ist. Bei Boris Hermanns „Seaexplorer“ beispielsweise wird die Beanspruchung der Takelage mit sogenannten Ring Pins anhand der Verformung der Bolzen an zentralen Punkten gemessen. Die Daten stehen an Bord auf dem Bildschirm zur Verfügung, und natürlich dem Autopiloten für Kursänderungen, wenn es zu heftig wird.

Seit einem Jahrzehnt beschäftigt sich „Pixel sur Mer“ in Lorient mit nautischer Mechatronik, Navigationsinstrumenten und fiberoptischen Sensoren. Zur Belastungsmessung in Faserverbundteilen wird Laser durch 250 Mikrometer dünne Glasfaserfäden geschickt, die in die Tragflächen, in den Mast oder unter anderem das Deck einlaminiert sind. 1 µm entspricht einem Tausendstel Millimeter. Ein Menschenhaar ist 100 µm dick.
Mehrere in ein Foil einlaminierte Messpunkte entlang eines solchen Glasfaserfadens geben anhand der geänderten Lichtfrequenz per sogenannter Faser-Bragg-Gitter Auskunft über die Verformung und damit Beanspruchung eines Bauteils. Die Franzosen haben die Technologie des amerikanischen Herstellers „Luna Innovations“ marinisiert, eines Spezialisten für fiberoptische Messungen von Deformationen, Temperaturschwankungen, Beschleunigung oder Gewicht. Fiberoptische Beschleunigungsmesser werden an Staudämmen oder Brücken, in der Energiegewinnung bei Windmühlen und Plattformen zur Öl- und Gasgewinnung montiert. Damit lassen sich Erdbeben in 3.000 km Entfernung messen.

Ein kurzer Blick in die Geschichte der modernen Navigationselektronik: 1956 begannen Major R. N. Gatehouse und sein englischer Kompagnon Ronald Brookes mit einem Funkpeiler. Sie führten in den Sechzigerjahren moderne Instrumente zur Geschwindigkeitsmessung, in den Achtzigern den Computer ins Regattasegeln ein. Heute bietet Brookes & Gatehouse mit der H 5000-Serie eine prozessorgesteuerte Instrumenten- und Autopilotfamilie. Darauf wurde für Grand Prix Anwendungen wie das Vendée Globe, das sogenannte Experten-System aufgepfropft. Es reagiert nicht allein wie ein erfahrener Segler auf Windänderungen, er lernt auch dazu. Zum Beispiel, wenn das Boot nach Verlassen des Wassers im Flugmodus beschleunigt und der Fahrwind entsprechend zunimmt. Der spitzere Windwinkel verlangt eine blitzschnelle Kursänderung, um das Boot in der Luft zu halten.
Samantaha Davies von „Initiatives Cœur“ schwärmte nach der letzten Vendée Globe von der Präzision ihres Autopiloten. „Er segelt schneller, als ich das Boot steuern kann. Und der Automat macht Sachen, die ich mich nicht traue.“

Angesichts all dieser weit ins Boot und die Takelage verästelten Sensorik, ihrer Vernetzung und beeindruckenden Möglichkeiten stellt der notorische Schiffermützenträger erschüttert fest, wie wenig das alles noch mit herkömmlichem Segeln zu tun hat. Mag sein. Nur zeigt die Vendée Globe die kompetitive Natur des Menschen unter einem Vergrösserungsglas. Zudem ist Regattasegeln ein arbeitsteiliger Sport, bei dem andauernd mit grosser Präzision auszuübende Aufgaben einem Automaten überlassen werden. Die Seglerinnen und Segler legen den Kurs durch die Hoch- und Tiefdruckgebiete fest, passen die Besegelung an, reparieren das Boot und halten die Technik instand.
Weitere Einzelheiten
Das Attitude Heading Reference System (AHRS) ist ein Messsystem zur Bestimmung von Roll-Nick-Gier-Winkeländerungen, von Beschleunigungen und Kurs bei der Steuerung von Flugzeugen oder Flugzeugmodellen.
Um für drei Achsen jeweils Drehung, Beschleunigung und Lage (relativ zum Magnetfeld) zu erfassen, sind wenigstens neun Einzelsensoren nötig. Das sind Gyroskope, Beschleunigungssensoren und Magnetometer. Zur Verbesserung der Messwerte kommen weitere Sensoren wie GPS hinzu.
Im Unterschied zu einem einfachen Inertialsensor werden die Rohwerte der Sensoren bereits vorverarbeitet, und zwar mit sogenannten Kalman-Filtern, die die Daten in einer automatisiert abfragbaren Schnittstelle bereitstellen.
